
在虚拟制片(VP)与增强现实(AR)的实际执行中,技术团队最常遭遇的底层穿帮,往往不是画面的渲染精细度,而是视觉透视的微观抖动与滑移。
当摄像机静止或进行极其缓慢的推移时,大屏幕上的虚拟背景或AR元素突然发生极其微弱的、肉眼难以察觉但大脑能本能感知的“微颤(Micro-tremor)”;或者,当摄像机快速摇移并紧急停机时,虚拟背景在屏幕上产生了一次轻微的“回弹”或“漂移”。
作为现场的系统集成总监(EIC)或追踪标定工程师,你深知这并非引擎的渲染出了问题,而是物理世界的机械振动、传感器的热噪点,与数字世界的采样延迟在进行高频对抗。
无论使用的是光学红外追踪(如 Vicon, OptiTrack)、惯性陀螺仪追踪,还是机械摇臂编码器,传回系统的原始 6DOF(六自由度)空间坐标数据,本质上都是带有高频噪声(High-frequency Noise)和时域延迟(Temporal Latency)的污浊数据。
如果在原生虚幻引擎(UE5)中直接将这些数据灌入 LiveLink 写入虚拟相机,其内置的线性插值(Lerp)或简单的指数移动平均算法(EMA)会立刻暴露出致命的工业局限:它无法在“滤除噪点(平滑度)”与“降低延迟(跟手度)”之间找到物理平衡。滤波开大,画面滞后漂移;滤波关小,背景高频颤抖。
Aximmetry 凭借其在底层 I/O 链路中集成的工业级数学滤波算法与动态延迟锁存矩阵,在混乱的物理运动信号与绝对刚性的三维渲染时钟之间,筑起了一道坚不可摧的数学防火墙。
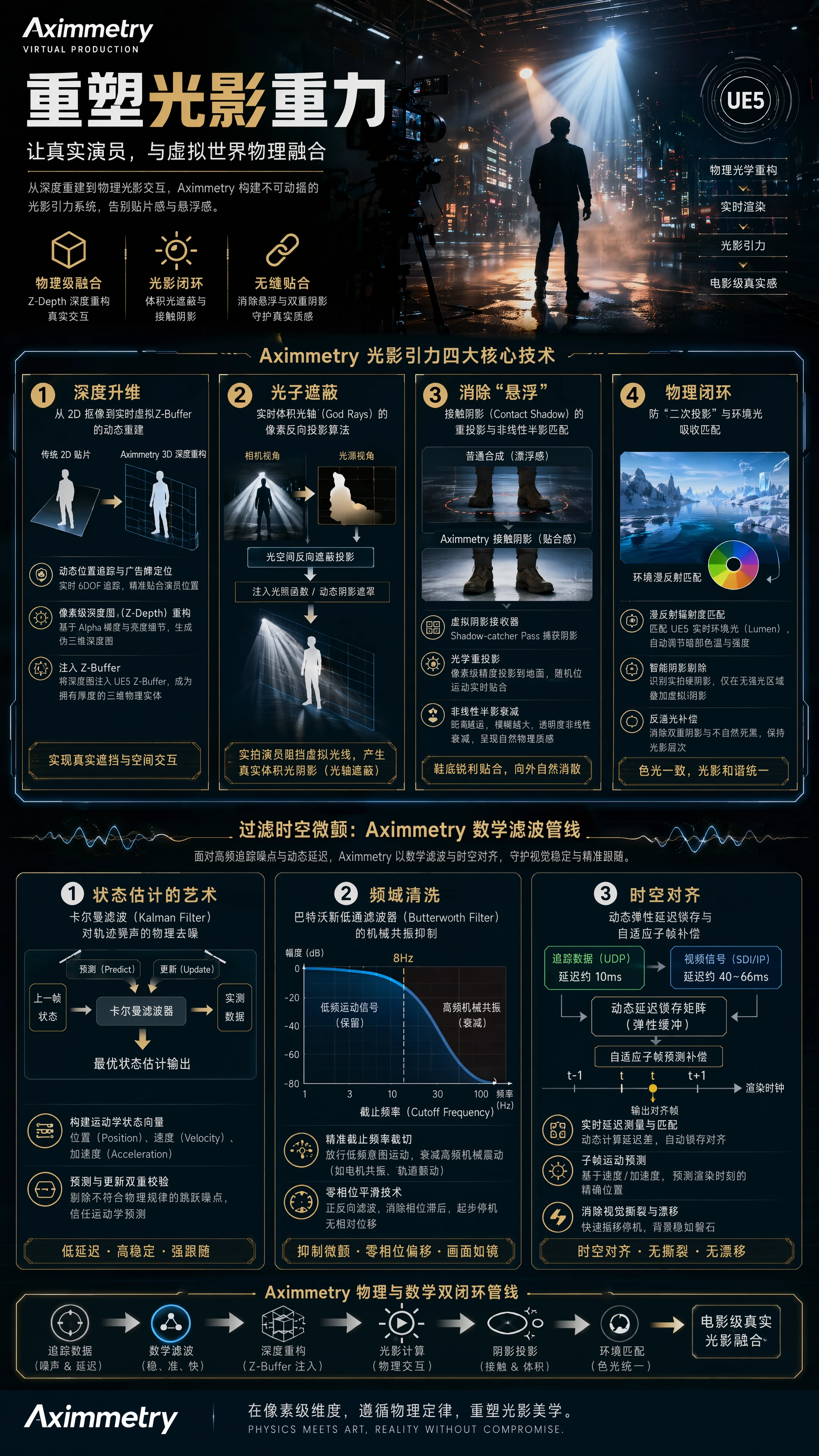
一、 状态估计的艺术:卡尔曼滤波(Kalman Filter)对轨迹噪声的物理去噪
光学追踪系统在遇到遮挡、反光或标记点(Markers)微小位移时,会产生瞬时的坐标跃迁(Jumping);而惯性传感器在静止时则会因为温漂和高频热噪声,输出不断微幅波动的坐标。
传统的插值算法是“马后炮”,它只能根据已经发生的错误坐标进行平滑,这不可避免地引入了明显的滞后(Lag)。
Aximmetry 的解法是在数据入口处部署了卡尔曼滤波(Kalman Filter)状态估计器。它的核心逻辑不是简单地对数据进行平滑,而是利用物理运动学模型去“预测”摄像机的真实轨迹。
1. 构建运动学状态向量
Aximmetry 的算法将摄像机视为一个拥有质量、惯性与摩擦力的物理实体。它在内存中实时维护着一个包含位置(Position)、速度(Velocity)和加速度(Acceleration)的状态向量。
2. 预测与更新的双重校验
在每一个渲染周期内,卡尔曼滤波器会进行两步计算:
- 预测阶段(Predict): 滤波器根据上一帧的速度和加速度,推算出当前帧摄像机“理应”处于的物理位置。
- 更新阶段(Update): 当追踪网卡送来最新的实测坐标时,滤波器会评估这个实测值。如果实测值突然发生了一个不符合物理加速定律的“瞬移突变”(例如由于光学遮挡导致的坐标跳跃),滤波器会将其判定为高频测量噪声,极大地降低该数据的权重,转而信任运动学模型的预测值。
通过这种预测与实测的动态博弈,Aximmetry 能够以极低的延迟,完美过滤掉由于传感器抖动或物理震动引发的高频毛刺,让静态相机的背景稳如磐石,同时保留了极高响应度的运动反馈。
二、 频域清洗:巴特沃斯低通滤波器(Butterworth Filter)的机械共振抑制
在摇臂(Jib/Crane)或手持轨道车拍摄时,电机的微弱共振、钢轨的物理缝隙、甚至现场重低音音响引起的空气震动,都会通过机械结构传导给相机传感器,产生频率在 10Hz 至 30Hz 之间的机械微共振。
这种特定频率的微颤,在 3D 渲染画面中会被无限放大。
Aximmetry 在流图中内置了巴特沃斯二阶低通滤波器(Second-Order Butterworth Low-Pass Filter),专门用于消灭特定频段的机械共振:
1. 截止频率(Cutoff Frequency)的精确裁切
现场工程师可以根据当前设备的物理特性,在 Aximmetry 中设定一个极其精确的截止频率(例如 8Hz)。 滤波器会放行所有低于 8Hz 的运动信号——因为人类摇移相机的意图、摇臂的平滑摆动都是低频信号;而所有高于 8Hz 的机械共振、震动噪点,则会被其幅频特性曲线无情地、呈指数级衰减抹杀。
2. 零相位平滑技术(Zero-Phase Filtering)
普通低通滤波器在滤除高频信号时,会导致波形在时间轴上向后偏移(产生相位滞后)。 Aximmetry 在非实时录制或拥有延迟缓冲的直播管线中,启用了先进的零相位平滑技术。它将数据流同时进行正向和反向两次滤波,使滤波后的运动波形与原始运动曲线在时间轴上完美重合。 这在彻底消灭抖动的同时,确保了摄像机起步与停机瞬间,背景与实拍画面之间没有任何毫秒级的相对位移。
三、 时空对齐:动态弹性延迟锁存与自适应子帧补偿
解决了空间坐标的噪点后,系统必须面对时间轴上的终极难题——动态延迟漂移(Temporal Latency Drift)。
在复杂的全IP化(SMPTE ST 2110)或传统 SDI 转播车环境下,视频信号从相机传感器经过 SDI 编码、光端机传输、采集卡解码,达到 Aximmetry 往往需要 2 到 4 帧(约 33ms 至 66ms)的物理延迟。 而追踪数据通过网线(UDP)发送,延迟通常只有 10ms 左右。
这两者之间存在一个大约 40ms 的非对称时间差。如果直接合成,当镜头向左快速横移时,AR 元素由于追踪信号到得早,会率先向右移动,产生严重的“视觉撕裂”。
