在电影级 LED 虚拟制片(ICVFX)的现场,最昂贵的资产不是显卡,也不是 LED 屏幕,而是时间。
为了最大化拍摄效率,导演往往要求“多机位同时开拍”。比如:A机位拍摄全景,B机位同时拍摄演员特写。 然而,在单块 LED 墙前,这会引发毁灭性的“视椎体撞车(Frustum Collision)”。
因为 LED 屏幕在同一瞬间,只能显示针对 A 机位透视正确的高清背景(内视椎体 Inner Frustum)。如果 B 机位强行开机,它拍到的背景将是完全拉伸、畸变且穿帮的画面。
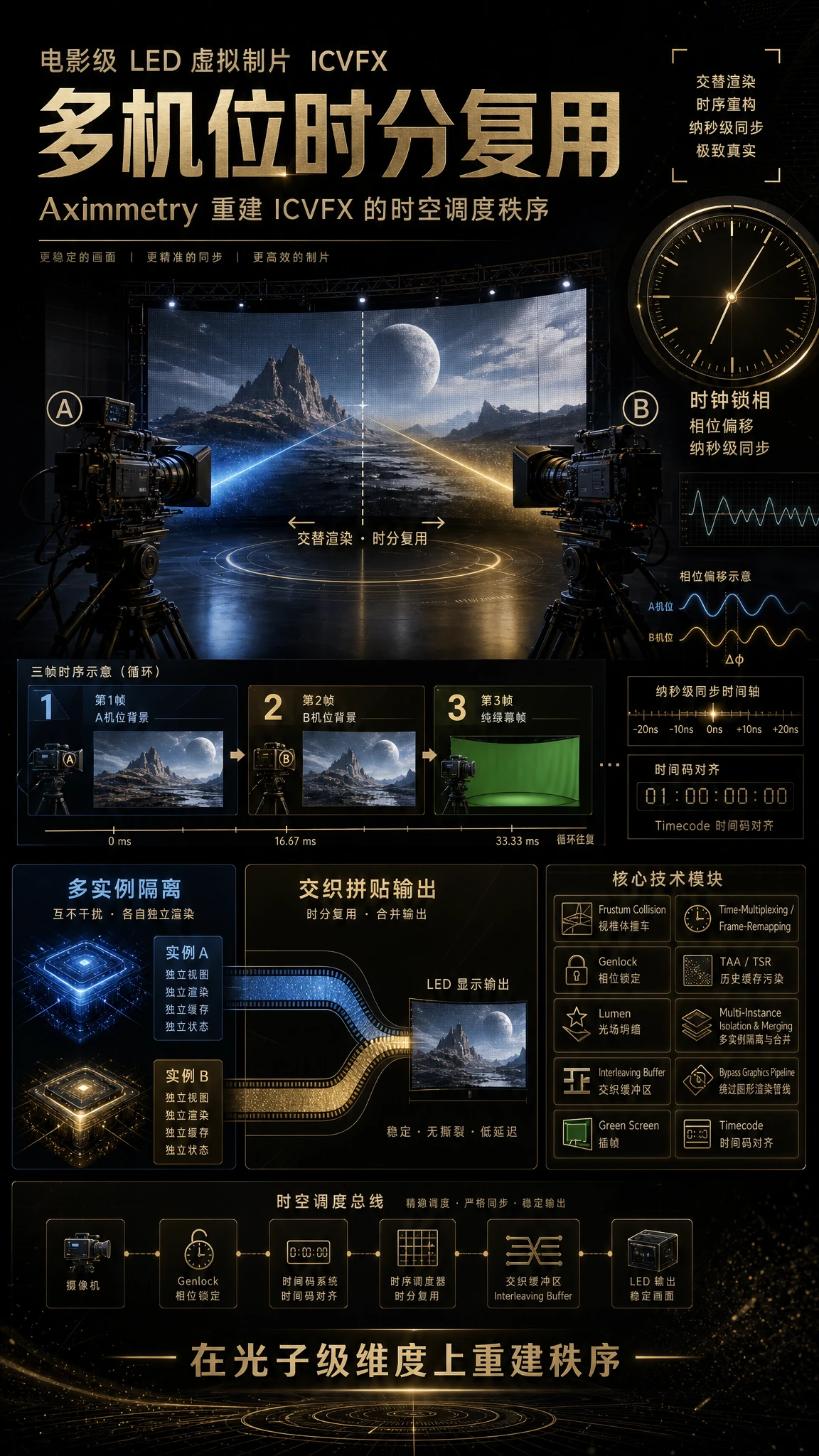
为了攻克这一物理极限,行业引入了最顶尖的同步技术——时分复用 / 帧重映射(Time-Multiplexing / Frame-Remapping)。
其原理是将 LED 屏幕的刷新率提升至物理极限(如 120Hz、192Hz 甚至 240Hz),并与多台相机的快门进行相位偏移(Phase Shifting)锁相:
- 第 1 帧: LED 墙渲染 A 机位的背景,A 相机快门开启,捕获画面;
- 第 2 帧: LED 墙渲染 B 机位的背景,B 相机快门开启,捕获画面;
- 第 3 帧(可选): LED 墙渲染纯绿幕,C 相机快门开启,捕获用于后期特效的纯净素材。
这一切发生在一秒钟内的几百个微小切片中,人眼只能看到一团混合的虚影,但相机却能各自拍到绝对干净、互不干扰的完美画面。
但这套“光子交错”的魔法,在系统集成上是一场工业级的灾难。它要求:
- 摄像机三电平锁相(Genlock)的微秒级相位偏转;
- LED 处理器(如 Brompton Tessera, Megapixel Helios)的高速帧编排;
- 虚幻引擎 5(UE5)渲染管线以 120fps 以上的高频交替渲染两个完全不同的机位视角。
原生的 UE5 nDisplay 在面对这种交替渲染(Alternating Rendering)时极其脆弱。
本文将深入拆解 Aximmetry 如何作为一套“时空调度总线”,攻克时分复用管线中三个最致命的底层技术黑洞。
痛点一:UE5 历史帧缓存污染与时域抗锯齿(TAA/TSR)的崩塌
虚幻引擎 5(UE5)为了实现电影级画质,其底层的 Lumen 全局光照和 TSR(时域超分辨率抗锯齿)极度依赖“历史帧缓存(History Buffers)”和运动矢量(Motion Vectors)。它需要用前一帧的像素来计算当前帧的噪点消除和光线反弹。
在 120Hz 的时分复用管线中,渲染序列是:A机位 -> B机位 -> A机位 -> B机位。
如果直接让 UE5 逐帧渲染,引擎默认的缓存机制会发生严重的“时空交叉感染”:
- 画面重影(Ghosting): 渲染 A 机位时,引擎会错误地读取上一帧(B 机位)的历史缓存来做时间去噪,导致 A 机位画面边缘出现由于 B 机位透视引发的诡异残影。
- Lumen 光场坍缩: 由于两个机位的视椎体截然不同,Lumen 的光线追踪场每隔 1/120 秒就被强行清空重算,导致画面产生刺眼的频闪(Flicker)和算力雪崩。
Aximmetry 的底层重构:
Aximmetry 凭借其独特的“多活引擎实例隔离与合并(Multi-Instance Isolation & Merging)”架构,从底层重写了渲染拓扑。
在 Aximmetry DE 架构下,它并不是在单个 UE5 实例中硬切摄像机,而是在后台同时运行两个完全隔离的引擎渲染实例(Engine Instances),分别锁定 A 机位与 B 机位。
- 实例 A 拥有自己专属的、纯净的 TAA 历史缓存与 Lumen 渲染树,它只负责按照 1/120 秒的节奏,渲染 A 机位透视下的奇数帧;
- 实例 B 同样独立运转,渲染 B 机位的偶数帧。
Aximmetry 的底层帧编排器(Frame Orchestrator)则在 GPU 显存内建立了一个高速的“交织缓冲区(Interleaving Buffer)”。 它以极其精确的 120Hz/240Hz 物理频率,将两个独立引擎实例渲染出的画面,像拉链齿轮一样交叉拼贴,输出给 LED 处理器。
这彻底断绝了机位间的缓存污染,既保全了 Lumen 的高画质,又消灭了时域抗锯齿的鬼影。
痛点二:Genlock 相位偏移(Phase Shifting)的纳秒级时钟漂移
时分复用的核心,是让相机的快门在特定的、转瞬即逝的毫秒级窗口内开启。 比如,在 120Hz 下,每个相机的曝光时间只有不到 4 毫秒。
如果相机的 Genlock 信号相位(Phase Angle)偏了仅仅 1 毫秒(0.001秒),相机快门就会在 LED 屏幕正在刷新下一个机位背景的过渡期开启。 表现在实拍画面中,就是 A 机位的胶片上,会隐隐约约叠加上 B 机位的虚影(物理漏光穿帮,Camera Leakage)。
在现场,手动调整相机和 LED 控制器的相位偏移极其痛苦,且由于网络延迟和硬件时钟温漂,运行几小时后系统就会产生微小的时钟漂移(Clock Drift)。
Aximmetry 的底层重构:
Aximmetry 扮演了整个系统中的“硬核时钟最高统帅(Master Clock Commander)”。
它不再被动接受外部信号,而是通过对高阶视频 SDI / IP 采集卡(如 AJA Kona 5)的硬件级 Genlock 输入端进行直接控制,将整个服务器的渲染时钟、追踪系统的元数据时钟、以及外部物理同步发生器(如 Evertz)发出的 PTP / 三电平锁相信号,全部归拢到 Aximmetry 内部的高精度硬件锁相环(PLL)中。
Aximmetry 的流图(Flow Graph)可以直接输出微秒级的控制指令。 当它监测到任何极微弱的帧同步抖动时,可以通过 API 实时、微调下发给 LED 处理器和追踪系统的同步相位。
这种自反馈的“闭环锁相系统”,确保了相机的快门开角(Shutter Angle)与 LED 屏幕的光子发射周期,在数十个小时的连续拍摄中,始终保持坚不可摧的绝对重合。
痛点三:实时动态绿幕插帧与多通道深度融合
在好莱坞级制作中,导演不仅要双机位实拍,还希望有一台备用机位(C机位)能拍到纯绿幕背景,以便后期如果对虚拟背景不满意,可以无痛切回传统 VFX 抠像工作流。
这就要求在
A机位背景 -> B机位背景的循环中,强行再插一帧纯绿幕背景(带有虚拟标志点的 Green Screen)。在原生的游戏引擎渲染管线中,要做到这一步,你得在每三帧里写一个材质判断,让场景里的所有物体瞬间隐藏并替换成发光的纯绿材质。 这会导致引擎材质管线的剧烈波动,造成显卡(GPU)管线在处理高频“状态切换(State Change)”时发生严重堵塞。